

The robot was built using LEGO Mindstorms kit and EV3 brick, and programmed using National Instrument’s LabVIEW

Light sensors, line following
The robot had to follow a line, so two light sensors were used to follow a straight, curved, and dotted line. These sensors also detected color so that the bins could be dropped at locations marked with a certain color.

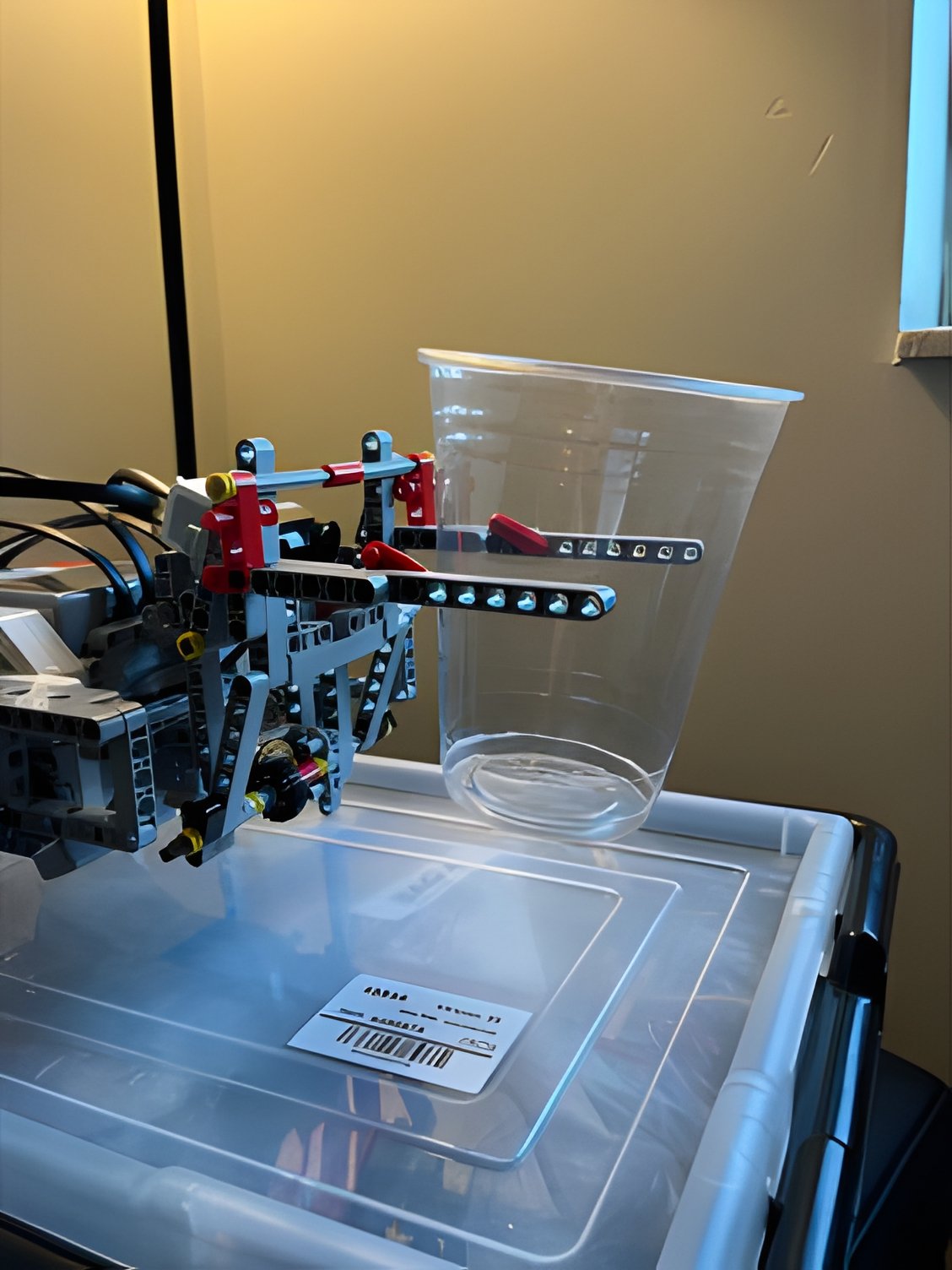
LabVIEW, Weight Detection
The robot was programmed using LabVIEW, and using the sensors and motors it was able to lift a cup and determine the weight of the contents. The robot then would take the cup to its dedicated drop-off location.